Surface types
Revision as of 13:41, 6 November 2018 by Antti Rintala (talk | contribs) (→Second-order quadratic surfaces)
Contents
Elementary surfaces
Notes:
- Elementary surfaces refer here to surfaces that can be represented by a single equation.
Planes
Notes:
- Parametric form of the general plane is assumed if four values are provided in the surface card. With six values the plane is assumed to be defined by three points.
- The positive side for a plane defined by three points is determined by the order in which the points are entered (see the right-hand rule).
| Surface name | Parameters | Surface equation | Description |
|---|---|---|---|
| px | x0 | 
|
Plane perpendicular to x-axis at x = x0 |
| py | y0 | 
|
Plane perpendicular to y-axis at y = y0 |
| pz | z0 | 
|
Plane perpendicular to z-axis at z = z0 |
| plane | A, B, C, D | 
|
General plane in parametric form |
| plane | x1, y1, z1, x2, y2, z2, x3, y3, z3 | General plane defined by three points |
Second-order quadratic surfaces
Notes:
- cyl is the same surface as cylz
- Infinite cylinder is assumed if three values are provided in the surface card for cylx, cyly, cylz or cyl. With five values the surface is assumed to be a truncated cylinder.
| Surface name | Parameters | Surface equation | Description |
|---|---|---|---|
| cylx | y0, z0, r | 
|
Infinite cylinder parallel to x-axis, centred at (y0,z0), radius r |
| cyly | x0, z0, r | 
|
Infinite cylinder parallel to y-axis, centred at (x0,z0), radius r |
| cylz, cyl | x0, y0, r | 
|
Infinite cylinder parallel to z-axis, centred at (x0,y0), radius r |
| cylv | x0, y0, z0, u0, v0, w0, r | 
|
Infinite cylinder, parallel to (u0,v0,w0), centred at (x0,y0,z0), radius r |
| sph | x0, y0, z0, r | 
|
Sphere, centred at (x0,y0,z0), radius r |
| cone | x0, y0, z0, r, h | 
|
Half cone parallel to z-axis, base at (x0,y0,z0), base radius r, height h (distance from base to vertex) |
| quadratic | A, B, C, D, E, F, G, H, I, J, K | 
|
General quadratic surface in parametric form |
Non-quadratic surfaces
Notes:
- Serpent can currently handle only circular torii. Radii R1 and R2 must be set equal (denoted in the surface equations as R).
| Surface name | Parameters | Surface equation | Description |
|---|---|---|---|
| inf | - | 
|
All space |
| torx | x0, y0, z0, r, R1, R2 | 
|
Circular torus with major radius R perpendicular to x-axis, centred at (x0, y0, z0), minor radius r |
| tory | x0, y0, z0, r, R1, R2 | 
|
Circular torus with major radius R perpendicular to y-axis, centred at (x0, y0, z0), minor radius r |
| torz | x0, y0, z0, r, R1, R2 | 
|
Circular torus with major radius R perpendicular to z-axis, centred at (x0, y0, z0), minor radius r |
Derived surface types
Notes:
- Derived surfaces refer here to surfaces composed of two or more elementary types.
Truncated cylinders
Notes:
- Truncated cylinders use the same names as the infinite cylinders above, with two additional values determining the height.
| Surface name | Parameters | Composed of | Description |
|---|---|---|---|
| cylx | y0, z0, r, z0, z1 | Infinite cylinder + two planes | Infinite cylinder parallel to x-axis, centred at (y0,z0), radius r, truncated between [z0, z1] |
| cyly | x0, z0, r, z0, z1 | Infinite cylinder + two planes | Infinite cylinder parallel to y-axis, centred at (x0,z0), radius r, truncated between [z0, z1] |
| cylz, cyl | x0, y0, r, z0, z1 | Infinite cylinder + two planes | Infinite cylinder parallel to z-axis, centred at (x0,y0), radius r, truncated between [z0, z1] |
Regular prisms
Notes:
- All prisms are parallel to z-axis, and they can be rotated using surface transformations.
| Surface name | Parameters | Composed of | Description |
|---|---|---|---|
| sqc | x0, y0, d | four planes | Infinite square prism parallel to z-axis, centred at (x0,y0), half-width d |
| rect | x0, x1, y0, y1 | four planes | Infinite rectangular prism parallel to z-axis, between [x0, x1] and [y0, y1] |
| hexxc | x0, y0, d | six planes | Infinite hexagonal prism parallel to z-axis, centred at (x0,y0), flat surface perpendicular to x-axis, half-width d |
| hexyc | x0, y0, d | six planes | Infinite hexagonal prism parallel to z-axis, centred at (x0,y0), flat surface perpendicular to y-axis, half-width d |
| hexxprism | x0, y0, d, z0, z1 | eight planes | Truncated hexagonal prism parallel to z-axis, centred at (x0,y0), flat surface perpendicular to x-axis, half-width d, truncated between [z0, z1] |
| hexyprism | x0, y0, d, z0, z1 | eight planes | Truncated hexagonal prism parallel to z-axis, centred at (x0,y0), flat surface perpendicular to y-axis, half-width d, truncated between [z0, z1] |
| octa | x0, y0, d1, d2 | eight planes | Infinite octagonal prism parallel to z-axis, centred at (x0,y0), half-widths d1 and d2 |
| dode | x0, y0, d1, d2 | twelve planes | Infinite dodecagonal prism parallel to z-axis, centred at (x0,y0), half-widths d1 and d2 |
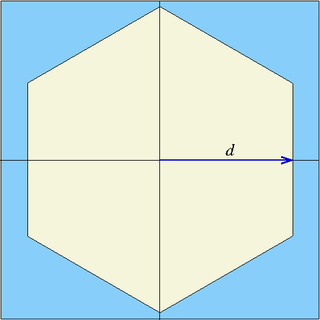
X-type hexagonal prism (hexxc)
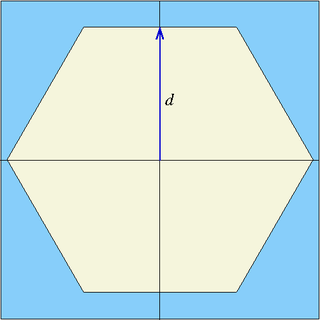
Y-type hexagonal prism (hexyc)
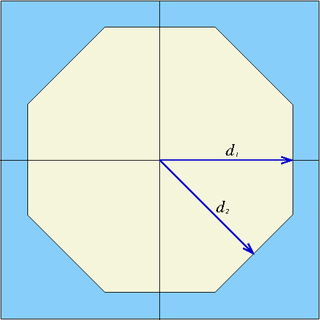
Octagonal prism (octa)
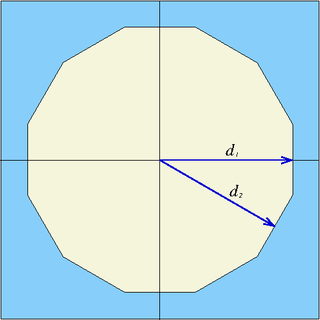
Dodecagonal prism (dode)




3D polyhedra
Notes:
- The description of parallelepiped may be wrong.
| Surface name | Parameters | Composed of | Description |
|---|---|---|---|
| cube | x0, y0, z0, d | six planes | Cube, centred at (x0,y0,z0), half-width d |
| cuboid | x0, x1, y0, y1, z0, z1 | six planes | Cuboid, between [x0, x1], [y0, y1] and [z0, z1] |
| ppd | x0, y0, z0, Lx, Ly, Lz,  x, y, z x, y, z
|
six planes | Parallelepiped, with corner at (x0, y0, z0) and edges of length Lx, Ly and Lz at angles x, y and z (in degrees) with respect to the coordinate axes
|
Other derived surface types
| Surface name | Parameters | Description |
|---|---|---|
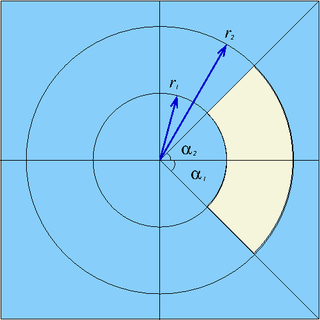
| pad | x0, y0, r1, r2, 1, 2
|
Sector from 1 to 2 (in degrees) of a cylinder parallel to z-axis, centred at (x0,y0), between radii r1 and r2
|
| cross | x0, y0, l, d | Cruciform prism parallel to z-axis, centred at (x0,y0), half-width l, half-thickness d |
| gcross | x0, y0, d1, d2, ... | Prism parallel to z-axis, centred at (x0,y0), formed by planes at distances dn from the center ("generalized cruciform prism", see figure below) |
Cylinder sector (pad)
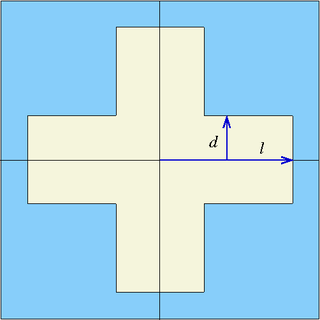
Cruciform prism (cross)
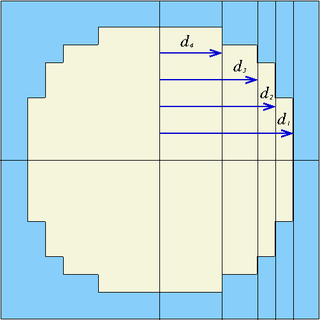
Generalized cruciform prism (gcross)



Rounded corners
Infinite prisms:
- sqc
- hexxc
- hexyc
- cross
Allow defining rounded corners. The radius is then provided as the last surface parameter (s in figure below):
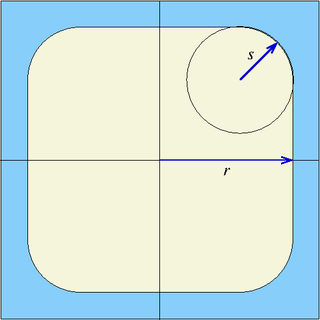
Square prism with rounded corners

MCNP-equivalent surfaces
Notes:
- Additional surfaces included to simplify input conversion between Serpent and MCNP.
- For description, see Chapter 3 of the MCNP5 User's Guide.[1]
| Surface name | Equivalent surface in MCNP |
|---|---|
| box | BOX |
| ckx | K/X |
| cky | K/Y |
| ckz | K/Z |
| mplane | P (form defined by three points) |
| rcc | RCC |
| x | X |
| y | Y |
| z | Z |
User-defined surfaces
Notes:
- Remember to make a backup of your subroutine before installing new updates.
- If you have a working surface routine that might be useful for other users as well, contact the Serpent team and we'll include it in the next update as a built-in type.
| Surface name | Parameters | Description |
|---|---|---|
| usr | p1, p2, ... | User-defined surface, implemented in source file "usersurf.c". The subroutine receives the number and list of surface parameters as input. Instructions are included as comments in the source file. |
References
- ^ X-5 Monte Carlo Team. "MCNP — A General Monte Carlo N-Particle Transport Code, Version 5, Volume II: User’s Guide." LA-CP-03-0245, Los Alamos National Laboratory, 2003.